

如何正确识别转速传感器发输出信号?
如何正确识别转速传感器发输出信号?
旋转机械在日常的生产或生活中占有非常高的比重,小到一个微型马达,大至万吨巨轮的庞大引擎。在对这些机械进行研究的同时, 地测量记录下其转速也成了一项很重要的任务。
光电传感器
光电传感器主要通过自身发射出一道光束,然后通过被测物体上的反光片将该光束进行反射,***后通过自身的感光元器件接收该反射光束。如果旋转件贴有n个反光片,那么该物体旋转一圈,光电传感器就会接收到n次反射光束,传感器每接受n次反射光束的时间就是该物体转速的倒数,从而可以推算出转速。
该传感器使用方便,运用范围广,如果配合光电编码盘一起使用可以达到比较高的测量精度。但同时也有一定的局限性,比如被测物体必须支持粘贴反光材料,不太适用于过小的物体或者封闭腔内物体转速的测量。
磁电传感器
磁电传感器利用电磁感应的原理,当旋转体通过感应线圈的时候,在感应线圈中产生感应电压,其通常会以方波或者脉冲波的形式输出信号。当旋转体转速越快的时候,输出信号的频率也就越高,通过对输出信号频率的分析从而检测到旋转物体的转速。磁电传感器的优点在于无需外加电源,并且在有烟雾、水气等环境中也可以使用,运行稳定。往往被用于齿轮以及电机转速的测量。
转速传感器的TTL信号:
激光转速传感器ROLS-5PW发出的标准信号是TTL信号(Transistor-Transistor Logic):TTL电平规定,+5V等价于逻辑“1”,0V等价于逻辑“0”。标准TTL输入高电平***小2V,输出高电平***小2.4V,典型值为3.4V。输入低电平更大 为0.8V,输出低电平更大 0.4V,典型值为0.2V。
如果转速传感器输出的是标准TTL信号,该传感器就可以直接接至硬件的pulse通道,硬件会主动通过AD转换,将该TTL信号转换为数字信号存储下来以便之后转速的计算。HEAD的数采硬件(SQuadriga,SQobold,HEADlab等)都配备有专门的pulse通道(独立于模拟通道之外)。

转速传感器其中***重要的一个参数就是旋转一圈产生的脉冲数。如果是光电传感器,这个参数就等于旋转轴上粘贴的反光片的数量;如果是磁电传感器,这个参数就取决于比如电机的转子数或者测速齿轮的齿数了;如果是点火线圈的话,因为每转两圈信号发生一次,此时参数应该是0.5。只有正确地定义出传感器的形状之后才能保证解压出的转速信号的准确性。
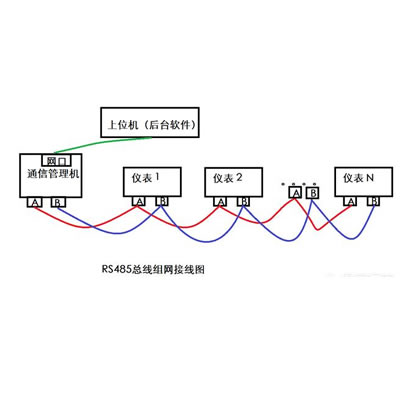 转速信号Modbus、RS485 和 4-20mA 之间的区
转速信号Modbus、RS485 和 4-20mA 之间的区
 luyor转速传感器如何和Simcenter SCADAS
luyor转速传感器如何和Simcenter SCADAS
 上海路阳手持荧光仪3415gfp波段是用哪个?
上海路阳手持荧光仪3415gfp波段是用哪个?
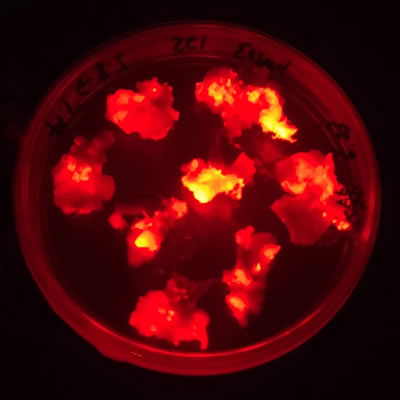 GFP/RFP/BFP/YFP荧光蛋白用什么激发光源?
GFP/RFP/BFP/YFP荧光蛋白用什么激发光源?